
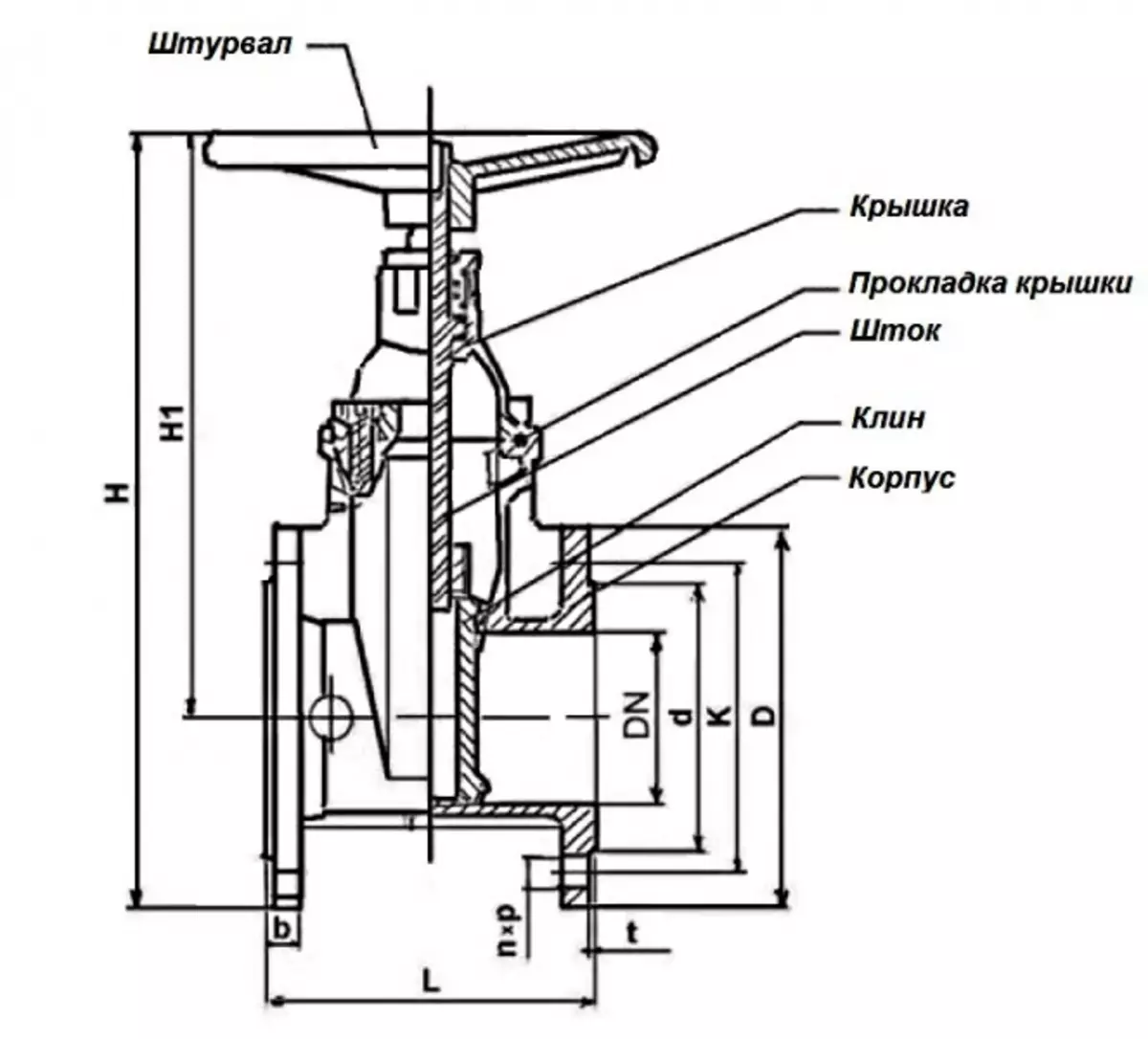
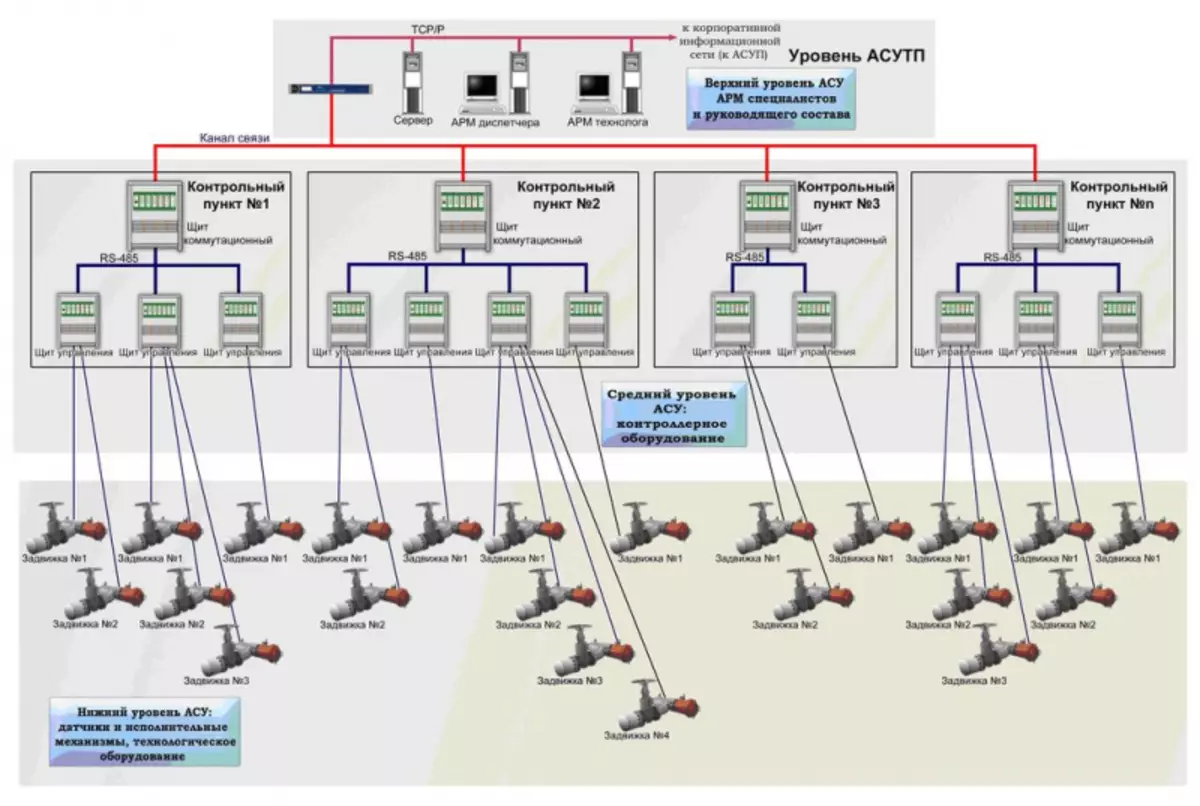
একটি ব্যাপকভাবে পরিচিত নিয়ন্ত্রক উপস্থাপন, পাইপলাইনে বাষ্প, গ্যাস বা তরল আন্দোলন ওভারল্যাপ করার জন্য ভালভ শাট অফ শক্তিবৃদ্ধি হিসাবে ব্যবহৃত হয়।
স্কিম ড্রাইভ ভালভ।
নকশা অনুযায়ী, 3 ধরনের ভালভ বিশিষ্ট হয়: ক্লিন্টবল, শঙ্কু এবং রিং।
CLINDATE ভালভগুলি সর্বশ্রেষ্ঠ বাস্তব অ্যাপ্লিকেশন পেয়েছে, তারা একটি ফ্ল্যাট শাটারের সাথে পাইপের তরল উত্তরণটি ওভারল্যাপ করার জন্য পরিবেশন করে, যা পার্শ্বযুক্ত তরল প্রবাহে প্রবেশ করে।
বৈদ্যুতিক যন্ত্রপাতি অটোমেশন
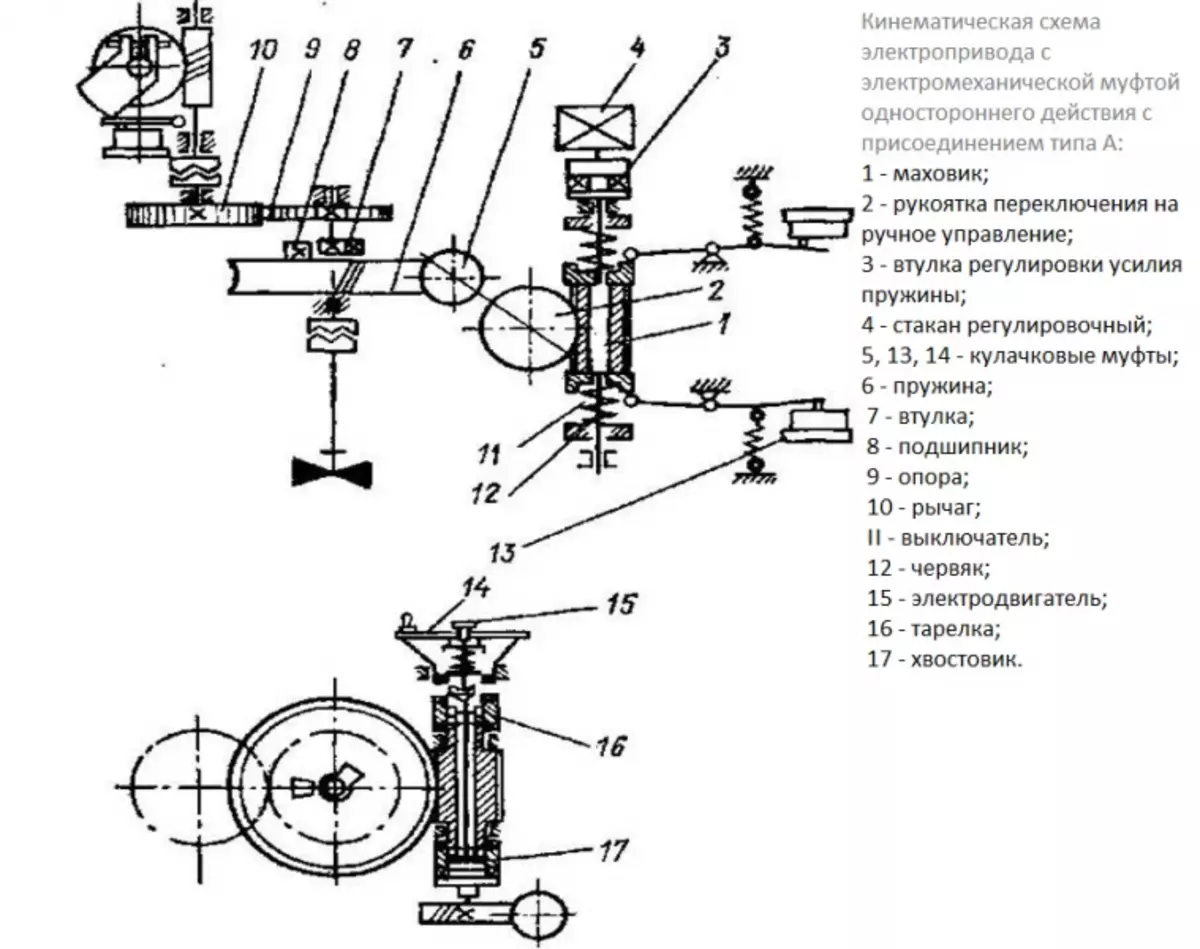
ইলেক্ট্রোমেকনিক্যাল ক্লাচ সঙ্গে মেকার সার্কিট।
একটি নিয়ম হিসাবে ভালভ, 2 কমান্ড সঞ্চালন করুন: নিয়ন্ত্রিত অঙ্গ (পাম্প বা ভক্তদের) এবং নিয়ন্ত্রিত পাম্পগুলি (স্তর, চাপ, চাপ, চাপ, তাপমাত্রা, ব্যবহার ইত্যাদি) উপর নির্ভর করে একটি পাইপলাইনটি বন্ধ বা খুলুন।
হাইড্রোলিক, বৈদ্যুতিক এবং বায়ুসংক্রান্ত ড্রাইভ ভালভ নিয়ন্ত্রণ করার একটি দূরত্ব এ বাহিত করা যেতে পারে। মূলত, যখন অটোমেশন, ভালভ ম্যানেজমেন্ট সরলতা ধন্যবাদ বৈদ্যুতিক ড্রাইভ ব্যবহার করে।
অ্যাসিঙ্ক্রোনাস ইঞ্জিন একটি বৈদ্যুতিক ভালভ, যা আউটপুট শ্যাফ্ট কীট গিয়ারবক্সের সাথে সংযুক্ত, এবং আউটপুট গিয়ার গিয়ার গিয়ার ভালভ আউটপুট স্ক্রু দিয়ে আকর্ষক হয়।
বৈদ্যুতিক মোটর অপারেশন চলাকালীন, স্ক্রু সঙ্গে একসঙ্গে শাটার হ্রাস বা বৃদ্ধি, বন্ধ বা ভালভ খোলার হয় । মধ্যবর্তী গিয়ারবক্সের মাধ্যমে গিয়ারবক্সের আউটপুট গিয়ারটি ক্যামের সাথে ডিস্কের সারিটির ঘূর্ণন প্রেরণ করে। ক্যামের উদ্বোধনের সময়, ক্যামটি ডানদিকে পরিণত হয় এবং কেভিও মাইক্রোসুইচ এর যোগাযোগগুলি স্যুইচ করে। ভালভ ক্যামের বন্ধ করার সময়, ক্যামেরা বাম দিকে ঘুরছে এবং মাইক্রোসাইট সুইচ এর পরিচিতিগুলি স্যুইচ করুন। CAMS এর সাথে ডিস্কগুলি এমনভাবে অবস্থিত যে ভালভের সম্পূর্ণ খোলার সময়, সুইচ সুইচটি ট্রিগার করা হয়, এবং সম্পূর্ণ ক্লোজিংয়ের সময় - এফসি এর স্যুইচ।
বৈদ্যুতিক শিফট কন্ট্রোল সার্কিট ডায়াগ্রাম 3 কন্ট্রোল মোড সরবরাহ করে: দূরবর্তী, স্বয়ংক্রিয় এবং নিযুক্ত।
দূরবর্তী ড্রাইভটি একটি দূরত্বে বৈদ্যুতিক ড্রাইভ নিয়ন্ত্রণ করার সময় ব্যবহার করা হয়, উদাহরণস্বরূপ, প্রেরণ কনসোল থেকে। এই মোডটি প্রস্তুত করার জন্য, 1 PAIS কন্ট্রোল সুইচটি "রিমোট" অবস্থানে সেট করা হয়েছে, "সক্ষম" অবস্থানে 2VB টগল স্যুইচ করুন, "বন্ধ" অবস্থানে 1 বি টগল স্যুইচ করুন। কন্ট্রোল প্যানেল নিয়ন্ত্রণ প্যানেলে সুইচ বি দ্বারা সরবরাহ করা হয়।
বিষয়টি নিবন্ধ: আপনার নিজের হাতে একটি ব্যালকনি তৈরি করুন: প্রযুক্তি, বৈশিষ্ট্য, ব্যবস্থা
কার্যকারিতা প্রকল্প
বৈদ্যুতিক ড্রাইভ ডায়াগ্রাম।
"ওপেন লিচ" কমান্ডটি অনুশীলন করার জন্য, অপারেটরটি 1 বি বোতাম টিপতে হবে, যার ফলে রিলে 1 পি চালু হয়। একই সময়ে, রিলে 1RP, চালু, তার খোলা পরিচিতি দ্বারা স্টার্টার কুণ্ডলের পাওয়ার সার্কিটে বন্ধ করে দেয় এবং এটি পরবর্তীতে অন্তর্ভুক্তিতে অবদান রাখে। একযোগে মোটর অন্তর্ভুক্তি সঙ্গে, মোটর চালু করা হয় এবং ভালভ খোলে।
যখন ভালভ একটি চরম অবস্থান পৌঁছেছে, এবং তার বন্ধ CVO যোগাযোগ, ব্লুরিং, সফ্টওয়্যার স্টার্টার বন্ধ করে (ভালভ বৈদ্যুতিক মোটর বন্ধ করা হয়) বন্ধ করে, এদিকে, খোলা যোগাযোগ KVO2, ক্লোজিং, ক্লোজিং, বন্ধ করে দেয় বাল্ব, যা ভালভ খোলা যে অপারেটর অবহিত।
বর্ণিত দৃশ্যকল্পের অনুরূপ, "ঘনিষ্ঠ লিচ" কমান্ডটি 2KU বোতামটি ব্যবহার করে ঘটে। ভালভ সম্পূর্ণরূপে বন্ধ হলে, LZ হালকা আলো আপ।
অ্যালার্ম সার্কিটের কার্যকারিতা জন্য, সংকেত গঠনের একটি মেরু চিহ্ন প্রয়োগ করা হয়েছিল। মেরু নির্বাচনের নীতিটি একটি সেমিকন্ডাক্টর ডায়োড ব্যবহার করে, সরঞ্জামটি বর্তমান দিকের সংবেদনশীল হতে পারে। একটি বর্তমান বা অন্য দিক পেতে, কন্ট্রোল অবজেক্টে এবং কন্ট্রোল প্যানেলে, ২ টি সেমিকন্ডাক্টর ডায়োড ব্যবহার করা হয়, যা পূর্ণ নির্বাচন এবং এক-অবস্থান সংশোধন করে, তাই 2 সংকেতগুলি একটি তারের দ্বারা প্রেরিত হয়। সুতরাং, যদি ভালভ সম্পূর্ণ খোলা থাকে, তবে ফ্লো ফুটোটি ডায়োড 1 ডি, 2 ডি এর মাধ্যমে ঘটে, যখন LO লাইট লাইট আপ হয়। যদি ভালভ সম্পূর্ণভাবে বন্ধ থাকে তবে ফ্লো ফুটোটি 3 ডি ডায়োডেসের মাধ্যমে, 4 ডি, লেজ লাইট লাইটস পর্যন্ত ঘটে।
স্বয়ংক্রিয় শাসন পরিকল্পনা
একটি বৈদ্যুতিক ড্রাইভ সঙ্গে পরিবর্তন টেবিল।
স্বয়ংক্রিয় মোড অপারেটর অংশগ্রহণ ছাড়া ঘটে। একটি স্বয়ংক্রিয় মোড প্রস্তুত করার জন্য, আপনাকে "স্বয়ংক্রিয়" অবস্থানে 1 টি প্যানেল স্যুইচটি সেট করতে হবে, "এ" অবস্থানে VK স্যুইচটি "চালু" অবস্থানে 1 বিবিবি টগল স্যুইচ করুন "বন্ধ" অবস্থানে এবং 2VB টগল সুইচ " সক্ষম "অবস্থান।
পরিচিতিগুলি বন্ধের মাধ্যমে নিয়ন্ত্রণ সার্কিট থেকে নিয়ন্ত্রিত প্যারামিটারগুলির মানগুলি (খরচ, স্তর, ইত্যাদি) উপর নির্ভর করে 1ark বা 2Рк, সংশ্লিষ্ট কমান্ড সরবরাহ করা হয়, যা রিলে 1RP বা 2pp অন্তর্ভুক্ত করতে অবদান রাখে। সফ্টওয়্যার বা PZ এর চৌম্বক যন্ত্রগুলি পাওয়া যায় এবং ভালভটি খুলতে বা বন্ধ করার জন্য উপযুক্ত কমান্ডগুলি চালানো হয়।
কন্ট্রোল কমান্ডের পাশাপাশি রিমোটে, স্বয়ংক্রিয় মোডে, স্বয়ংক্রিয় মোডে Sunbathing LO এবং LZ সংকেত আলো দ্বারা নিরীক্ষণ করা হয়।
বিষয় নিবন্ধ: ব্যালকনি নকশা ধারনা
মেরামত কাজ বা ইনস্টলেশনের পরে বৈদ্যুতিক ড্রাইভের শিফটের অপারেশনটি পরীক্ষা করার জন্য সমন্বয় মোড সরবরাহ করা হয়। এই মোডটি প্রস্তুত করতে, আপনাকে অবশ্যই "সক্ষম" অবস্থানে 1bb টগল স্যুইচ ইনস্টল করতে হবে। কন্ট্রোল সার্কিটে সরবরাহ ভোল্টেজ স্বয়ংক্রিয় সার্কিট ব্রেকার এভি সরবরাহ করা হয়। "ওপেন লিচ" কমান্ডটি কার্যকর করার জন্য আপনাকে অবশ্যই 4 বোতাম বোতাম টিপুন, যখন খোলার আবিষ্কারের উদ্বোধনী সফ্টওয়্যারটি চালিত হয়।
একটি বেড়া ভালভ একটি ডিভাইসের প্রকল্প।
উপরন্তু, প্রকল্পে নিম্নলিখিত পরিবর্তন:
- এটি স্ব-ব্লকিংয়ের শৃঙ্খলে পি 1 এর ক্লোজিং (খোলা) যোগাযোগ বন্ধ করে দেয় (কমান্ডটি স্মরণ করার জন্য)।
- পারস্পরিক ব্লকিং সার্কিটে PO2 এর খোলার (বন্ধ) যোগাযোগটি আনলক করে (মিথ্যা দলকে প্রতিরোধ করার জন্য)।
- PO3 পাওয়ার যোগাযোগের বৈদ্যুতিক মোটর 3 এর সার্কিটে এবং বৈদ্যুতিক মোটর, ভালভ ঊর্ধ্বে স্থানান্তর সহ বৈদ্যুতিক মোটর।
যখন ভালভ সম্পূর্ণরূপে খোলে, ডিস্ক ক্যাম সিভিও সুইচ টিপে, যার বন্ধ যোগাযোগটি অবরুদ্ধ, এবং স্টার্টার বন্ধ হয়ে যায়। সফটওয়্যারটির শুরুতে পরিচিতিগুলি তার মূল অবস্থায় ফিরে এসেছে, মোটরটি বন্ধ হয়ে গেছে, এবং ভালভ স্টপগুলি।
"বন্ধ লিট" কমান্ডটি কার্যকর করার জন্য, 5 বি বোতাম টিপুন, যখন চৌম্বক স্টার্টারের সাথে পিজেটি ভালভটি চালানো যায় তখন PZ ভালভ চালিত হতে পারে। উপরের কমান্ডের মতো, বৈদ্যুতিক মোটরটি বন্ধ করার সার্কিটটি ঘটে, ঘূর্ণায়মানের দিক (বিপরীত মোড) পরিবর্তন। ভালভ বন্ধ ঘটে। ইলেকট্রিক মোটর মাইক্রোসুইচ সুইচ এর যোগাযোগ খোলার মাধ্যমে বন্ধ করা হয়।
নিম্নলিখিত ধরনের সুরক্ষা ব্যবস্থাপনা প্রকল্পে প্রদান করা হয়
কন্ট্রোল প্যানেল সার্কিট।
RPC বোতামটি বৈদ্যুতিক মোটর জরুরী শাটডাউন ব্যবহৃত হয়।
- ন্যূনতম ভোল্টেজের সুরক্ষা (জিরো সুরক্ষা) সুরক্ষাটি এমন একটি সুরক্ষা যা নেটওয়ার্ক ভোল্টেজ বা এর উল্লেখযোগ্য হ্রাসের সম্পূর্ণ অন্তর্ধানগুলি ট্রিগার করে, যা ভোল্টেজটি হঠাৎ পুনরুদ্ধার করা হয় তবে চৌম্বকীয় স্টার্টারগুলি ব্যবহার করে এটি তৈরি করা হয়। ইলেক্ট্রোম্যাগনেটিক ভোল্টেজ রিলে।
- বৈদ্যুতিক ব্লকিং। এই সুরক্ষাটি PZ স্টার্টার পাওয়ার সাপ্লাই সার্কিট এবং এর বিপরীতে বিচ্ছিন্নতা অন্তর্ভুক্ত করে অর্জন করে অর্জন করা হয়। তদুপরি, সফ্টওয়্যার স্টার্টার চালু থাকলে, PZ এর পাওয়ার সাপ্লাই সার্কিটটি খোলা থাকবে এবং চৌম্বক স্টার্টারের সাথে প্রারম্ভিক স্টার্টারটি চালু করা অসম্ভব।
- ভালভ এনক্যামিং করার সময় ওভারলোড থেকে বৈদ্যুতিক মোটর সুরক্ষা: VM এর সীমার মুহূর্তের মাইক্রোওয়েভের যোগাযোগগুলি খোলার মাধ্যমে এটি সঞ্চালিত হয়, উভয় বিদ্রোহীদের মোট পাওয়ার সাপ্লাই সার্কিটে প্রবেশ করে।
- সর্বাধিক সুরক্ষা একটি বড় স্বল্পমেয়াদী ওভারলোড এবং শর্ট সার্কিট স্রোত থেকে বৈদ্যুতিক মোটর সুরক্ষা সুরক্ষা। এটি সার্কিট ব্রেকার্সের ফুস বা ইলেক্ট্রোম্যাগনেটিক quilted সার্কিট ব্যবহার করে সঞ্চালিত হয়।
বিষয়টি নিবন্ধটি: রেফ্রিজারেটরের দরজা বন্ধ করে না: কেন এবং কী করা উচিত?
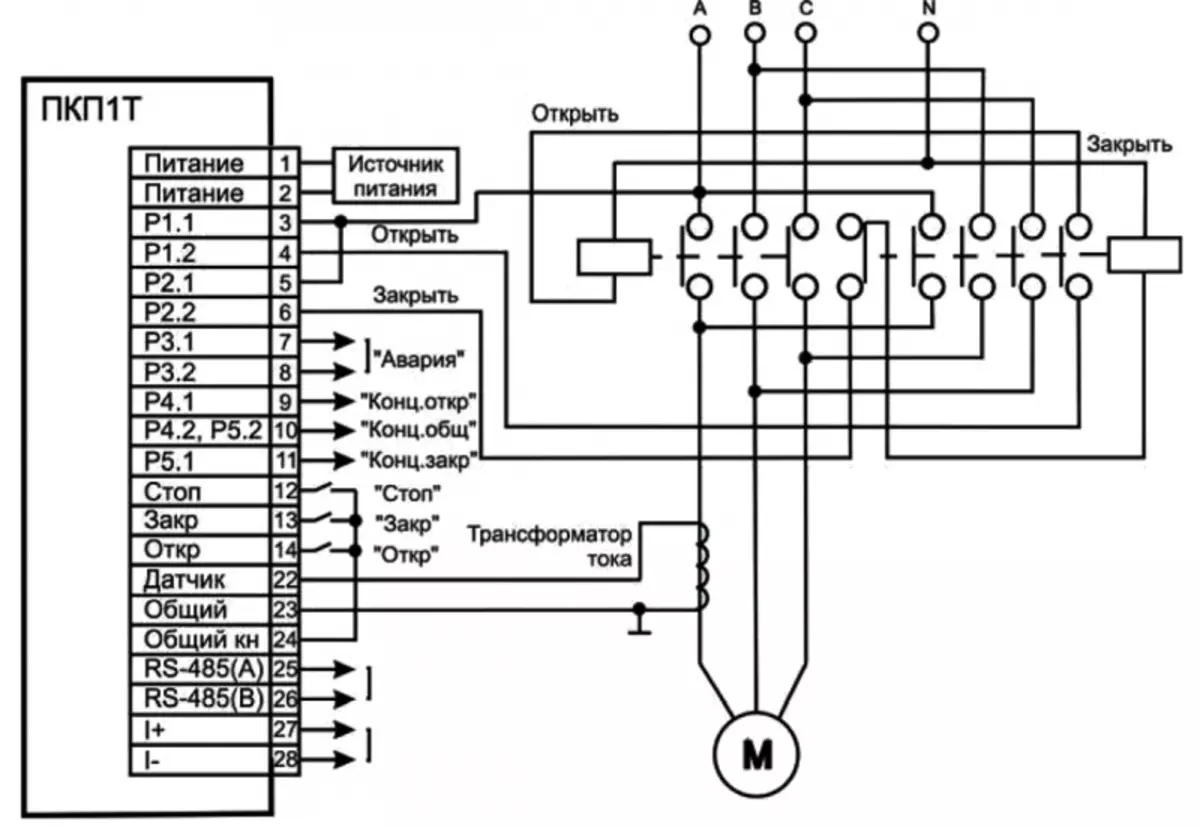
PCP1 এর সীমা সুইচ ব্যবহার না করে ভালভ শাটটিং ডিভাইস সুরক্ষা এবং নিয়ন্ত্রণ:
- PKP1T - বৈদ্যুতিক ড্রাইভ দ্বারা গ্রাস, এবং তার আন্দোলনের সময়, বর্তমান ভালভ অবস্থান নিয়ন্ত্রণ করে;
- PKP1I - পালস যুগে ভালভের অবস্থানগুলি নিয়ন্ত্রণ করে, যা তার শ্যাফ্টে অবস্থিত সেন্সর থেকে আসে এবং রোলার সংখ্যা থেকে আসে।
উদ্দেশ্য
পিসিপি 1 ডিভাইসটি "ভোডোকানাল" সিস্টেমে শাটার এবং ভালভগুলি নিয়ন্ত্রণ করার পাশাপাশি সীমাবদ্ধ সুইচ ব্যবহার না করে জ্যামিংয়ের ক্ষেত্রে তাদের সুরক্ষা এবং বৈদ্যুতিক ড্রাইভগুলির সাথে তাদের রক্ষা করার জন্য ডিজাইন করা হয়েছে।
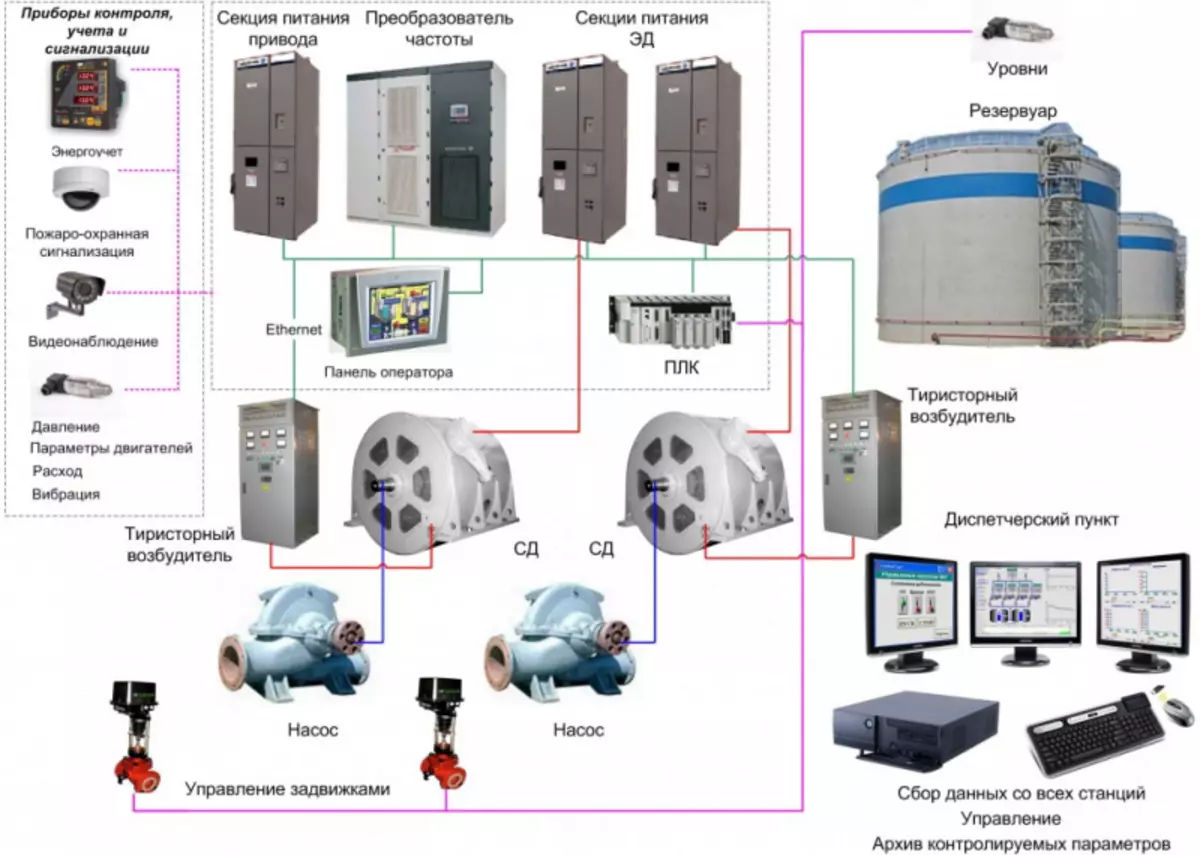
পাম্পিং স্টেশন এর প্রকল্প।
প্রধান কার্যাবলী:
- বৈদ্যুতিক ড্রাইভের স্বয়ংক্রিয় শাটডাউন যখন চরম অবস্থানটি সীমা সুইচ ব্যবহার না করে পৌঁছানো হয়;
- এর মধ্যে ভালভের বর্তমান অবস্থানের ইঙ্গিত এবং নিয়ন্ত্রণ;
- বৈদ্যুতিক ড্রাইভের ব্যবস্থার চিল্পেজের সময় বা ভালভ জ্যামিংয়ের সময় "দুর্ঘটনা" সংকেতটি চালানো এবং "দুর্ঘটনা" সংকেত সরবরাহ করা;
- পিসিপি 1 তে দুটি আউটপুট রিলে রয়েছে, দুটি রিলে, সীমা সুইচ এবং অ্যালার্মের জন্য রিলে অনুকরণ করার জন্য।
উপরন্তু, পিসিপি 1-তে গ্রাহকের অনুরোধে, একটি আরএস -485 কম্পিউটার বা একটি মডিউলের সাথে বার্তা ইন্টারফেসের মডিউল যা একটি সমন্বিত বর্তমান সংকেত (4-20 মা) তৈরি করে, যা ভালভের আবিষ্কারের ডিগ্রির আনুপাতিক, মাউন্ট করা যাবে।
প্রোগ্রামিং। বস্তুর উপর সেটিং।
বস্তুটিতে ডিভাইসটি কনফিগার করার জন্য, অঙ্কনটি অস্থায়ী অগ্রগতি প্যারামিটার এবং শেষ অবস্থানগুলি নির্ধারণ করার উপায়গুলি সেট করা হয়।
যদি বৈদ্যুতিক ড্রাইভের অপারেটিং বর্তমানটি পরিচিত হয় তবে আপনাকে সুরক্ষামূলক শাটডাউন পরামিতিগুলি সেট করতে হবে। নির্দিষ্ট পরামিতিগুলি অ-ভলটাইল ডিভাইস মেমরিতে সংরক্ষণ করা হবে এবং শক্তিটি বন্ধ হয়ে গেলে অপরিবর্তিত থাকবে। সামনে প্যানেলে অবস্থিত বোতামগুলির সাথে ডিভাইসটি প্রোগ্রামিং করে।
প্যারামিটার পরিবর্তন অননুমোদিত অ্যাক্সেস প্রতিরোধ করার জন্য, সুরক্ষা ইনস্টল করা হয়।