
വ്യാപകമായി അറിയപ്പെടുന്ന റെഗുലേറ്റർ അവതരിപ്പിക്കുന്നു, നീരാവി, വാതകം അല്ലെങ്കിൽ ദ്രാവകം പൈപ്പ്ലൈനുകളിലെ ചലനത്തെ ഓവർലാപ്പ് ചെയ്യുന്നതിന് വാൽവ് ഉപയോഗിച്ചു.
സ്കീം ഡ്രൈവ് വാൽവുകൾ.
ഡിസൈനിനനുസരിച്ച് 3 തരം വാൽവുകൾ വേർതിരിച്ചറിയുന്നു: ക്ലിന്റ്ബോൾ, കോണാകൃതിയിലുള്ളതും മോതിരം.
ക്ലെൻകെറ്റ് വാൽവുകൾക്ക് ഏറ്റവും വലിയ പ്രായോഗിക ആപ്ലിക്കേഷൻ ലഭിച്ചതിനാൽ, പൈപ്പിലെ ദ്രാവകത്തിന്റെ ഭാഗത്തെ ഓവർലാപ്പ് ചെയ്യുന്നതിന് അവർ സേവിക്കുന്നു, അത് ലംബ ദ്രാവകത്തിന്റെ ഒഴുക്ക് പ്രവേശിക്കുന്നു.
ഇലക്ട്രിക് ഉപകരണത്തിന്റെ ഓട്ടോമേഷൻ
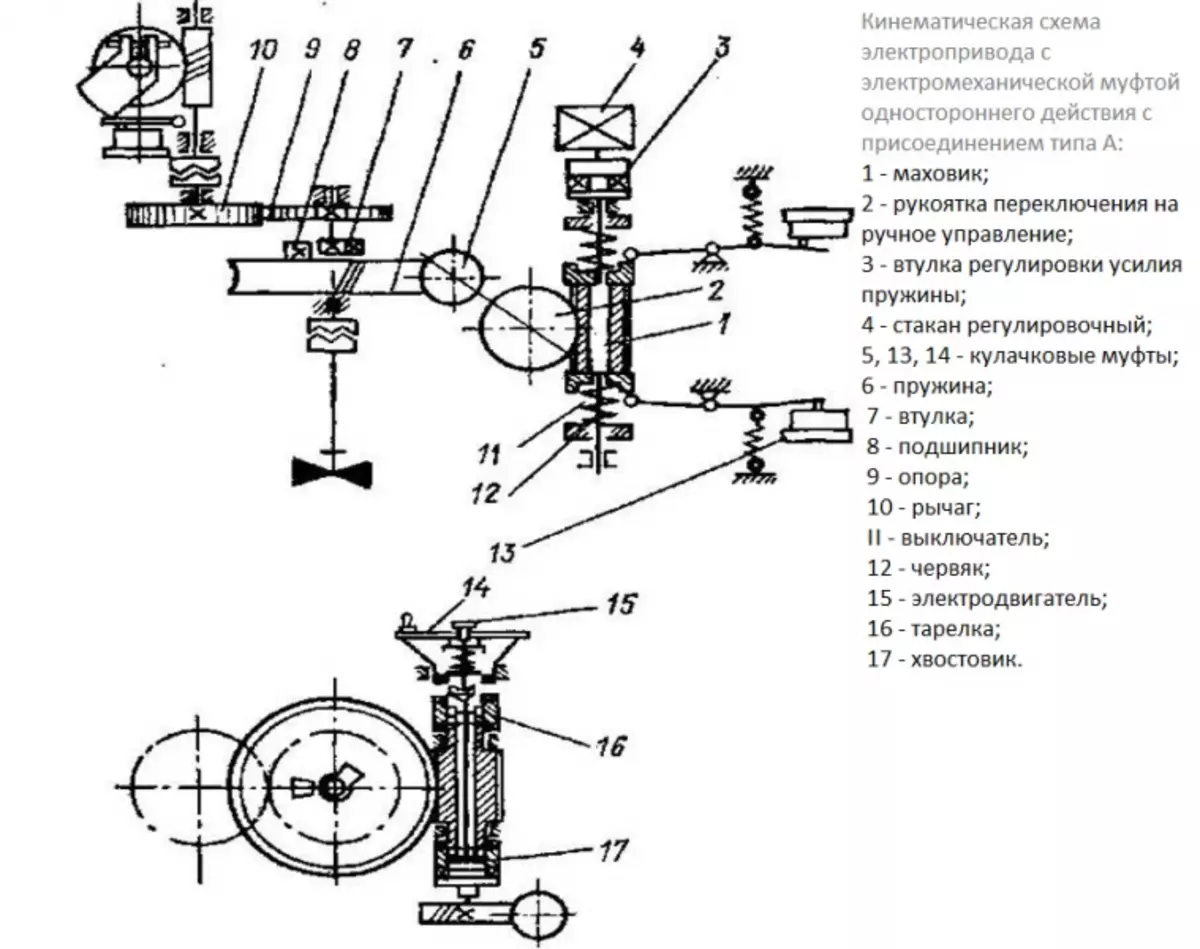
ഇലക്ട്രോമെക്കനിക്കൽ ക്ലച്ച് ഉപയോഗിച്ച് നിർമ്മാതാവ് സർക്യൂട്ട്.
വാൽവുകൾ, ഒരു ചട്ടം പോലെ, 2 കമാൻഡുകൾ നടത്തുക: നിയന്ത്രിത അവയവങ്ങൾ (പമ്പുകൾ അല്ലെങ്കിൽ ആരാധകരുടെ), നിയന്ത്രിത പാരാമീറ്ററുകൾ മാറ്റുന്നതിൽ നിന്ന് ഒരു പൈപ്പ്ലൈൻ അടയ്ക്കുകയോ തുറക്കുകയോ ചെയ്യുക (ലെവൽ, മർദ്ദം, താപനില, ഉപഭോഗം മുതലായവ).
വാൽവ് നിയന്ത്രിക്കുന്നതിന് ഒരു അകലെയുള്ള ഹൈഡ്രോളിക്, ഇലക്ട്രിക്, ന്യൂമാറ്റിക് ഡ്രൈവ് എന്നിവ നടപ്പാക്കാം. അടിസ്ഥാനപരമായി, യാന്ത്രികമാകുമ്പോൾ, മാനേജ്മെന്റിന്റെ ലാളിത്യത്തിന് നന്ദി, വാൽവ് ഇലക്ട്രിക് ഡ്രൈവ് ഉപയോഗിക്കുന്നു.
അസിൻക്രണസ് എഞ്ചിൻ ഒരു ഇലക്ട്രിക് വാൽവ്, അത് പുഴു ഗിയർബോക്സിലേക്ക് കണക്റ്റുചെയ്തിരിക്കുന്ന output ട്ട്പുട്ട് ഷാഫ്റ്റ്, put ട്ട്പുട്ട് ഗിയർ ഗിയർ ഗിയർ വാൽവ് output ട്ട്പുട്ട് സ്ക്വിയുമായി ഇടപഴകുന്നു.
ഇലക്ട്രിക് മോട്ടത്തിന്റെ പ്രവർത്തന സമയത്ത്, സ്ക്രൂസുമായുള്ള ഷട്ടർ കുറയ്ക്കുകയോ ഉയരുകയോ സമാീകരിക്കുകയോ തുറക്കുകയോ ചെയ്യുന്നു . ഇന്റർമീഡിയറ്റ് ഗിയർബോക്സിലൂടെ ഗിയർബോക്സിന്റെ output ട്ട്പുട്ട് ഗിയർ ക്യാമുകളുള്ള ഡിസ്കുകളുടെ നിരയുടെ ഭ്രമണത്തെ പകരുന്നു. ക്യാംസ് തുറക്കുമ്പോൾ, ക്യാം വലത്തേക്ക് തിരിയുകയും kVO മൈക്രോവിച്ചിന്റെ കോൺടാക്റ്റുകൾ മാറ്റുകയും ചെയ്യുന്നു. വാൽവ് ക്യാമുകൾ അടയ്ക്കുമ്പോൾ, ക്യാമുകൾ ഇടത്തേക്ക് തിരിഞ്ഞ് മൈക്രോവൈറ്റ് സ്വിച്ചിന്റെ കോൺടാക്റ്റുകൾ മാറ്റുന്നു. വാൽവ് പൂർണ്ണമായ തുറന്ന രീതിയിൽ ക്യാമുകൾ ഉള്ള ഡിസ്കുകൾ സ്ഥിതിചെയ്യുന്നത്, സ്വിച്ച് സ്വിച്ച് പ്രവർത്തനക്ഷമമാക്കി, പൂർണ്ണമായ ക്ലോസിംഗിനിടെ - എഫ്സിയുടെ സ്വിച്ച്.
ഇലക്ട്രിക് ഷിഫ്റ്റ് കൺട്രോൾ കൺട്രോൾ സർക്യൂട്ട് ഡയഗ്രം 3 കൺട്രോൾ മോഡ് നൽകുന്നു: വിദൂര, യാന്ത്രികവും നിയമിതവുമായത്.
ഉദാഹരണത്തിന്, ഡിസ്പാച്ച് കൺസോളിൽ നിന്ന് ഇലക്ട്രിക് ഡ്രൈവ് നിയന്ത്രിക്കുമ്പോൾ വിദൂര മോഡ് ഉപയോഗിക്കുന്നു. ഈ മോഡ് തയ്യാറാക്കാൻ, 1 Pais കൺട്രോൾ സ്വിച്ച് "വിദൂര" സ്ഥാനത്തേക്ക് സജ്ജമാക്കി, "പ്രാപ്തമാക്കി" സ്ഥാനത്തേക്ക് 2 വിബി ടോഗിൾ സ്വിച്ച് ചെയ്യുക, 1 ബി ടോഗിൾ "ഓഫ്" സ്ഥാനത്തേക്ക് മാറുക. നിയന്ത്രണ പാനലിന്റെ നിയന്ത്രണ പാനലിൽ സ്വിച്ച് ബി വിതരണം ചെയ്യുന്നു.
വിഷയത്തെക്കുറിച്ചുള്ള ലേഖനം: നിങ്ങളുടെ സ്വന്തം കൈകൊണ്ട് ഒരു ബാൽക്കണി നിർമ്മിക്കുക: സാങ്കേതികവിദ്യ, സവിശേഷതകൾ, ക്രമീകരണം
പ്രവർത്തന പദ്ധതി
ഇലക്ട്രിക്കൽ ഡ്രൈവ് ഡയഗ്രം.
"ഓപ്പൺ ലിച്ച്" കമാൻഡ് പ്രയോഗിക്കുന്നതിന്, ഓപ്പറേറ്റർ 1 ബി ബട്ടൺ അമർത്തേണ്ടതുണ്ട്, അതുവഴി റിലേ 1 പി ഓണാക്കുക. അതേസമയം, റിലേ 1rp, ഓണാക്കി, സ്റ്റാർട്ടർ കോയിലിന്റെ പവർ സർക്യൂട്ട് തുറന്ന കോൺടാക്റ്റിൽ അവസാനിക്കുന്നു, ഇത് രണ്ടാമത്തേത് ഉൾപ്പെടുത്തുന്നതിലേക്ക് സംഭാവന ചെയ്യുന്നു. ഒരേസമയം മോട്ടോർ ഉൾപ്പെടുന്നതിനൊപ്പം മോട്ടോർ ഓണാക്കുകയും വാൽവ് തുറക്കുകയും ചെയ്യുന്നു.
വാൽവ് അങ്ങേയറ്റത്തെ സ്ഥാനത്ത് എത്തുമ്പോൾ, kvo ടെർമിനൽ മൈക്രോവിച്ച് അമർത്തുമ്പോൾ, മങ്ങിക്കൽ സോഫ്റ്റ്വെയർ സ്റ്റാർട്ടർ ഓഫാകും (വാൽവ് ഇലക്ട്രിക് മോട്ടോർ ഓഫാക്കുന്നു), ഉടമ്പടി തുറന്ന കോൺടാക്റ്റ്, സിഗ്നൽ ലൈറ്റ് ഓണാക്കുക ബൾബ്, വാൽവ് തുറന്ന ഓപ്പറേറ്ററെ അറിയിക്കുന്നു.
വിവരിച്ച സാഹചര്യത്തിന് സമാനമായ സാഹചര്യത്തിന് സമാനമായ "അടയ്ക്കുക lith" കമാൻഡ് 2ku ബട്ടൺ ഉപയോഗിക്കുന്നു. വാൽവ് പൂർണ്ണമായും അടയ്ക്കുമ്പോൾ, LZ ലഘുവായ ലൈറ്റ്സ് അപ്പ്.
സിഗ്നലുകളുടെ രൂപീകരണത്തിന്റെ ധ്രുവ ചിഹ്നം പ്രയോഗിച്ച അലാറം സർക്യൂട്ടിന്റെ പ്രവർത്തനത്തിനായി. ധ്രുവര തിരഞ്ഞെടുക്കാനുള്ള തത്വം ഒരു അർദ്ധചാലകൻ ഡയോഡ് ഉപയോഗിക്കുന്നു എന്നതാണ്, ഉപകരണങ്ങൾ നിലവിലെ ദിശയിലേക്ക് സംവേദനക്ഷമമാക്കാം. ഒരു നിലവിലുള്ള അല്ലെങ്കിൽ മറ്റ് ദിശ, നിയന്ത്രണ വസ്തു എന്നിവയിൽ, കൺട്രോൾ പാനലിൽ, 2 അർദ്ധവിരാമങ്ങൾ ഡയോഡ് ഉപയോഗിക്കുന്നു, ഇത് പൂർണ്ണ തിരഞ്ഞെടുപ്പും ഒരു സ്ഥാനവും തിരുത്തൽ നിർവഹിക്കുന്നു, അതിനാൽ 2 സിഗ്നലുകൾ ഒരു വയർ വഴി കൈമാറുന്നു. അതിനാൽ, വാൽവ് പൂർണമായും തുറന്നാൽ, ഡയോഡ് 1 ഡി, 2 ഡി, 2 ഡി, അതേസമയം ലോ ലൈറ്റ് ലൈറ്റ്സ് എന്നിവയിലൂടെ ഒഴുകുന്നു. വാൽവ് പൂർണ്ണമായും അടച്ചിട്ടുണ്ടെങ്കിൽ, ഫ്ലോ ചോർച്ച സംഭവിക്കുന്നത് 3D ഡയോഡുകളിലൂടെയാണ്, 4 ഡി, എൽഇസെഡ് ലൈറ്റ് ലൈറ്റ്സ് അപ്പ്.
യാന്ത്രിക വ്യവസ്ഥ പദ്ധതി
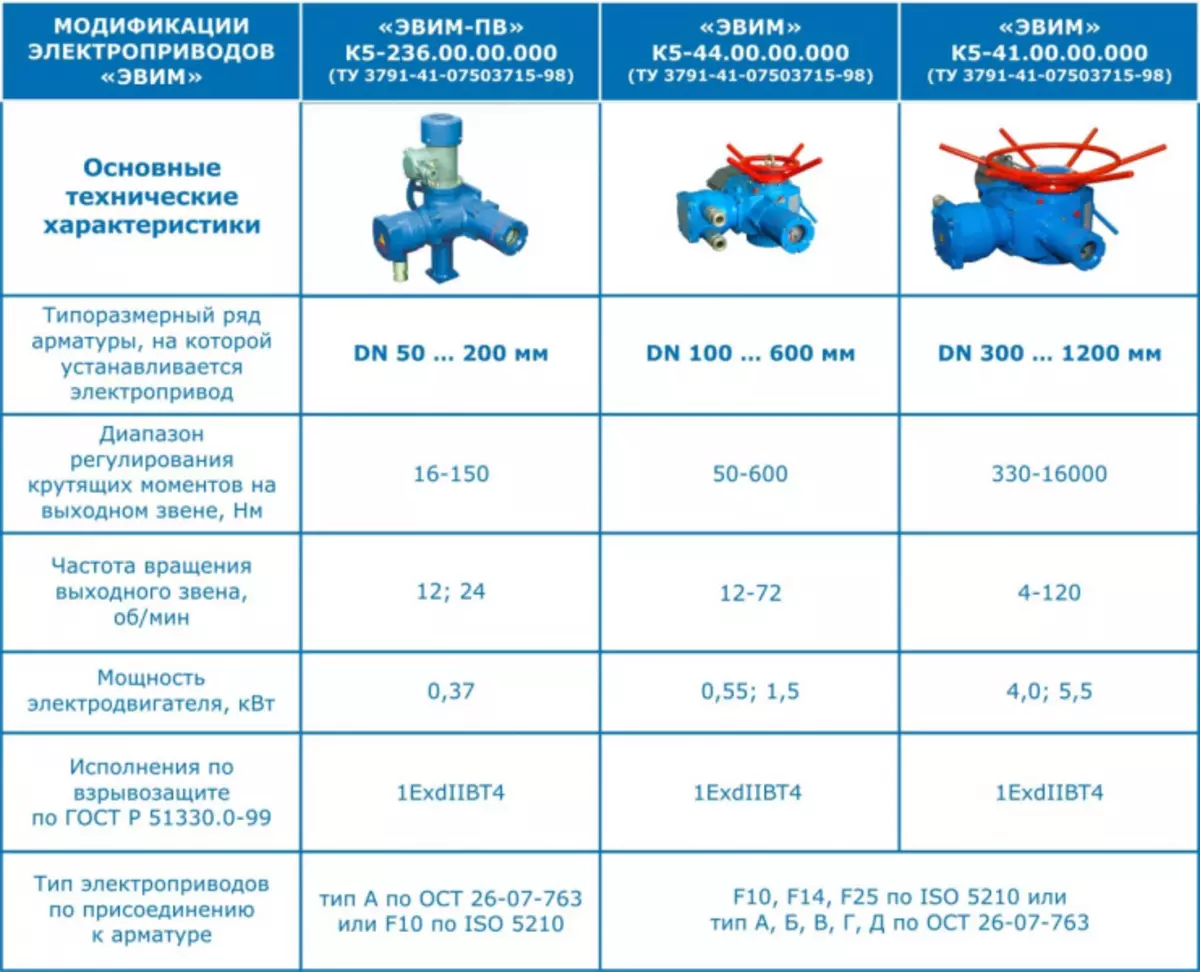
ഒരു ഇലക്ട്രിക് ഡ്രൈവ് ഉള്ള പരിഷ്കാരങ്ങളുടെ പട്ടിക.
ഓപ്പറേറ്ററുടെ പങ്കാളിത്തമില്ലാതെ യാന്ത്രിക മോഡ് സംഭവിക്കുന്നു. ഒരു ഓട്ടോമാറ്റിക് മോഡ് തയ്യാറാക്കാൻ, നിങ്ങൾ 1 പാനൽ സ്വിച്ച് സജ്ജമാക്കിയിട്ടുള്ള "ഓട്ടോമാറ്റിക്" സ്ഥാനത്തേക്ക് സജ്ജമാക്കേണ്ടതുണ്ട്, "ഓൺ" സ്ഥാനത്തേക്ക് മാറുക, 1 ബിബി ടോഗിൾ "ഓഫ്" സ്ഥാനത്തേക്ക് മാറുക, 2 വിബി ടോഗിൾ ഓഫ് ചെയ്യുക " പ്രവർത്തനക്ഷമമാക്കിയ "സ്ഥാനം.
നിയന്ത്രണ സർക്യൂട്ടിൽ നിന്ന് കോൺടാക്റ്റുകളുടെ അടയ്ക്കൽ അനുസരിച്ച് (ഉപഭോഗം, ലെവൽ, മുതലായവ) അനുസരിച്ച് 1рк അല്ലെങ്കിൽ 2рккк, കോൺടാക്റ്റുകളുടെ അടയ്ക്കൽ അനുസരിച്ച്, ഇതേ കമാൻഡ് വിതരണം ചെയ്യുന്നു, ഇത് റിലേ 1 ആർപി അല്ലെങ്കിൽ 2pp ഉൾപ്പെടുത്തുന്നതിന് കാരണമാകുന്നു. സോഫ്റ്റ്വെയർ അല്ലെങ്കിൽ പിസങ്കിയുടെ കാന്തിക ഉപകരണങ്ങൾ ലഭിക്കുകയും വാൽവ് തുറക്കാനോ അടയ്ക്കുകയോ ചെയ്യാനോ ഉചിതമായ കമാൻഡുകൾ നടപ്പിലാക്കുകയും ചെയ്യുന്നു.
നിയന്ത്രണ കമാൻഡിനെ വധശിക്ഷയും വിദൂര മോഡിലും സൺബത്ത് ലോ, എൽഇഎസ് സിഗ്നൽ ലാമ്പുകൾ എന്നിവയിലൂടെ യാന്ത്രിക മോഡ് നിരീക്ഷിക്കുന്നു.
വിഷയത്തെക്കുറിച്ചുള്ള ലേഖനം: ബാൽക്കണി ഡിസൈൻ ആശയങ്ങൾ
റിപ്പയർ ജോലി അല്ലെങ്കിൽ ഇൻസ്റ്റാളേഷൻ കഴിഞ്ഞ് ഇലക്ട്രിക് ഡ്രൈവിന്റെ ഷിഫ്റ്റിന്റെ പ്രവർത്തനം പരീക്ഷിക്കുന്നതിനായി ക്രമീകരണ മോഡ് നൽകിയിട്ടുണ്ട്. ഈ മോഡ് തയ്യാറാക്കാൻ, "പ്രാപ്തമാക്കി" സ്ഥാനത്തേക്ക് നിങ്ങൾ 1 ബിബി ടോഗിൾ സ്വിച്ച് ഇൻസ്റ്റാൾ ചെയ്യണം. നിയന്ത്രണ സർക്യൂട്ടിലേക്ക് സപ്ലൈ വോൾട്ടേജ് ഓട്ടോമാറ്റിക് സർക്യൂട്ട് ബ്രേക്കർ ഏവിലേക്ക് നൽകി. "ഓപ്പൺ ലിച്ച്" കമാൻഡ് നടപ്പിലാക്കുന്നതിന്, നിങ്ങൾ 4 ബട്ടൺ ബട്ടൺ അമർത്തണം, ഓപ്പണിംഗ് ഡിസ്കവറി ഓപ്പണിംഗ് സോഫ്റ്റ്വെയർ അധികാരപ്പെടുത്തിയത്.
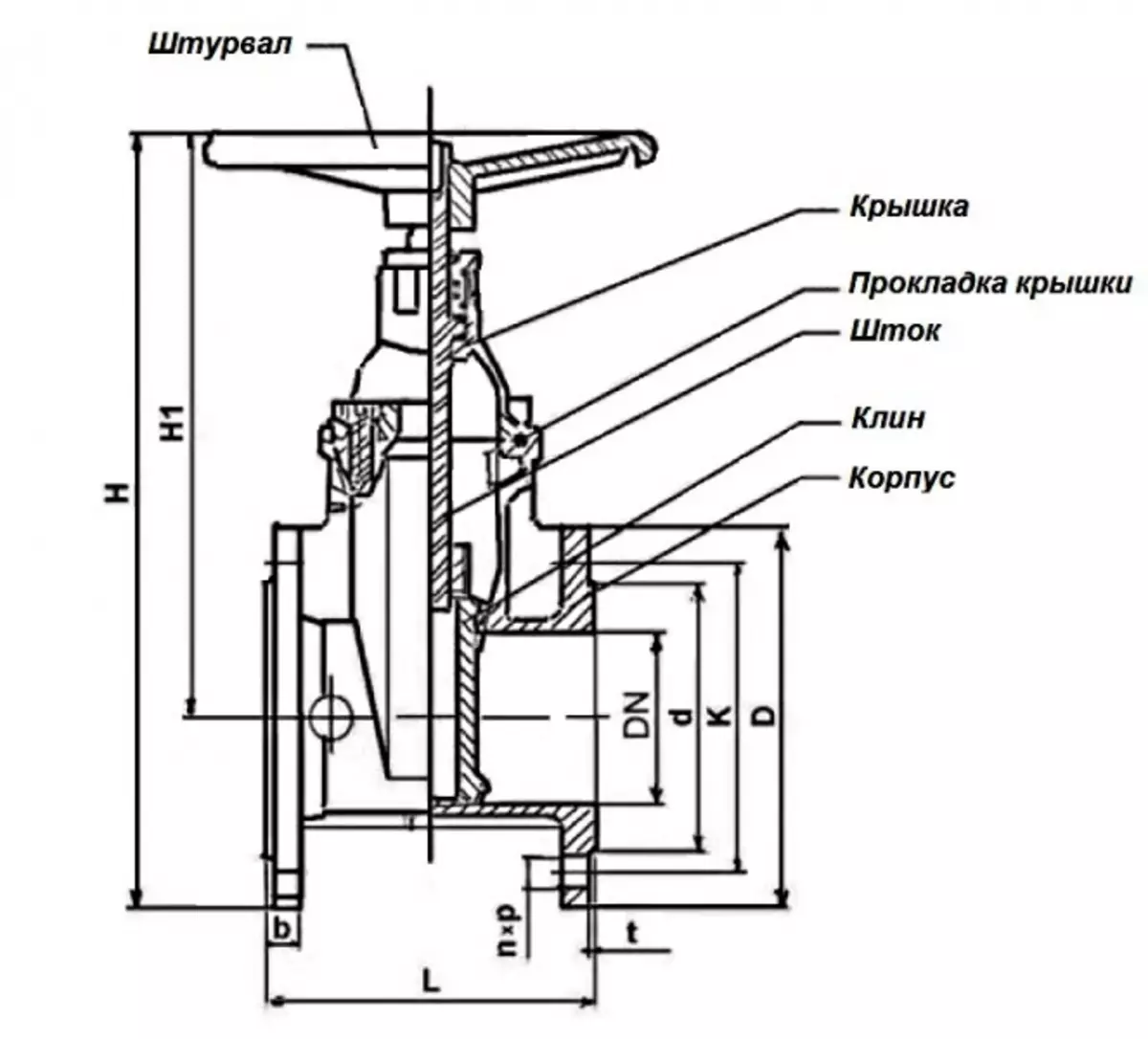
ഒരു വെഡ്ജ് വാൽവിന്റെ ഉപകരണത്തിന്റെ പദ്ധതി.
കൂടാതെ, സ്കീമിലെ ഇനിപ്പറയുന്ന മാറ്റങ്ങൾ:
- ഇത് സ്വയം തടയൽ ശൃംഖലയിൽ പി 1 ന്റെ ക്ലോസിംഗ് (തുറന്ന) ബന്ധപ്പെട്ടിരിക്കുന്നു (കമാൻഡ് മന or പാഠമാക്കുന്നതിന്).
- പരസ്പര തടയൽ സർക്യൂട്ടിൽ ഓപ്പണിംഗ് (അടച്ച) ബന്ധപ്പെട്ടിരിക്കുന്നു (തെറ്റായ ടീം തീറ്റ തടയുന്നതിന്).
- പോ 3 പവർ കോൺടാക്റ്റിന്റെ ഇലക്ട്രിക് മോട്ടോർ 3 ന്റെ സർക്യൂട്ടിൽ, വാൽവ് മുകളിലേക്ക് കൈമാറ്റം ഉൾപ്പെടെയുള്ള ഇലക്ട്രിക് മോട്ടം.
വാൽവ് പൂർണ്ണമായും തുറക്കുമ്പോൾ, ഡിസ്ക് ക്യാം സിവിഒ സ്വിച്ച് അമർത്തി, അതിന്റെ അടച്ച സമ്പർക്കം തടഞ്ഞു, സ്റ്റാർട്ടർ ഓഫുചെയ്യുന്നു. സോഫ്റ്റ്വെയറിന്റെ തുടക്കത്തിന്റെ കോൺടാക്റ്റുകൾ അതിന്റെ യഥാർത്ഥ അവസ്ഥയിലേക്ക് മടങ്ങിയെത്തുന്നു, മോട്ടോർ ഓഫാക്കി, വാൽവ് നിർത്തുന്നു.
"അടയ്ക്കുക lith" കമാൻഡ് എക്സിക്യൂട്ട് ചെയ്യുന്നതിന്, 5 ബി ബട്ടൺ അമർത്തുക, കാന്തിക സ്റ്റാർട്ടറിലേക്ക് അടയ്ക്കുന്നത് PZ ന് നൽകാം. മുകളിലുള്ള കമാൻഡിന് സമാനമായ, ഇലക്ട്രിക് മോട്ടോർ ഓഫുചെയ്യുന്നതിനുള്ള സർക്യൂട്ട്, ഭ്രമണത്തിന്റെ ദിശ (റിവേഴ്സ് മോഡ്) മാറ്റങ്ങൾ സംഭവിക്കുന്നു. വാൽവ് അടയ്ക്കൽ സംഭവിക്കുന്നു. മൈക്രോവിച്ച് സ്വിച്ചിന്റെ സമ്പർക്കം തുറന്ന് ഇലക്ട്രിക് മോട്ടോർ ഓഫാക്കി.
മാനേജുമെന്റ് സ്കീമിൽ ഇനിപ്പറയുന്ന തരത്തിലുള്ള പരിരക്ഷണം നൽകിയിട്ടുണ്ട്
പാനൽ സർക്യൂട്ട് നിയന്ത്രിക്കുക.
ഇലക്ട്രിക് മോട്ടോറിന്റെ അടിയന്തരാവസ്ഥയിൽ ആർപിസി ബട്ടൺ ഉപയോഗിക്കുന്നു.
- നെറ്റ്വർക്ക് വോൾട്ടേജിന്റെ പൂർണ്ണമായ അപ്രത്യക്ഷമാകുന്ന ഒരു സംരക്ഷണമാണ് അല്ലെങ്കിൽ അത് പെട്ടെന്ന് പുന ored സ്ഥാപിക്കുന്നുവെങ്കിൽ, കാന്തിക സ്റ്റാർട്ടറുകൾ ഉപയോഗിച്ചാണ് ഉപയോഗിക്കുന്ന ഒരു സംരക്ഷണമാണിത്. വൈദ്യുതകാന്തിക വോൾട്ടേജ് റിലേകൾ.
- ഇലക്ട്രിക്കൽ തടയൽ. PZ സ്റ്റാർട്ടർ പവർ വിതരണ സർക്യൂട്ടിന്റെ നിർമ്മാതാവിനെ ഉൾപ്പെടുത്തിക്കൊണ്ട് ഈ പരിരക്ഷ കൈവരിക്കുന്നു, തിരിച്ചും. അതനുസരിച്ച്, സോഫ്റ്റ്വെയർ സ്റ്റാർട്ടർ ഓണായിരിക്കുമ്പോൾ, പിഎസിന്റെ വൈദ്യുതി വിതരണ സർക്യൂട്ട് തുറന്നിരിക്കും, കൂടാതെ മാഗ്നറ്റിക് സ്റ്റാർട്ടറുമായി ഒരേസമയം pr സ്റ്റാർട്ട് പ്രവർത്തിപ്പിക്കാൻ കഴിയില്ല.
- വാൽവ് മാപ്പ് നടത്തുമ്പോൾ ഓവർലോഡിൽ നിന്ന് ഇലക്ട്രിക് മോട്ടോറിന്റെ സംരക്ഷണം: വിഎം ഓഫ് വിമതത്തിന്റെ പരിധിയുടെ വളവിന്റെ വസ്ത്രം ധരിച്ച മൈക്രോവേവ് ആരംഭിച്ചതാണ് ഇത് നടത്തുന്നത്.
- ഒരു വലിയ ഹ്രസ്വകാല ഓവർലോഡും ഹ്രസ്വ സർക്യൂട്ട് കറന്റുകളും നിന്നുള്ള ഇലക്ട്രിക് മോട്ടത്തിന്റെ സംരക്ഷണമാണ് പരമാവധി പരിരക്ഷണം. സർക്യൂട്ട് ബ്രേക്കറുകളുടെ ഫ്യൂസുകൾ അല്ലെങ്കിൽ വൈദ്യുതകാന്തിക ക്വോയിറ്റ് സർക്യൂട്ടുകൾ ഉപയോഗിച്ചാണ് ഇത് നടപ്പിലാക്കുന്നത്.
വിഷയത്തെക്കുറിച്ചുള്ള ലേഖനം: റഫ്രിജറേറ്ററിന്റെ വാതിൽ അടയ്ക്കുന്നില്ല: എന്തുകൊണ്ട് എന്തുചെയ്യണം?
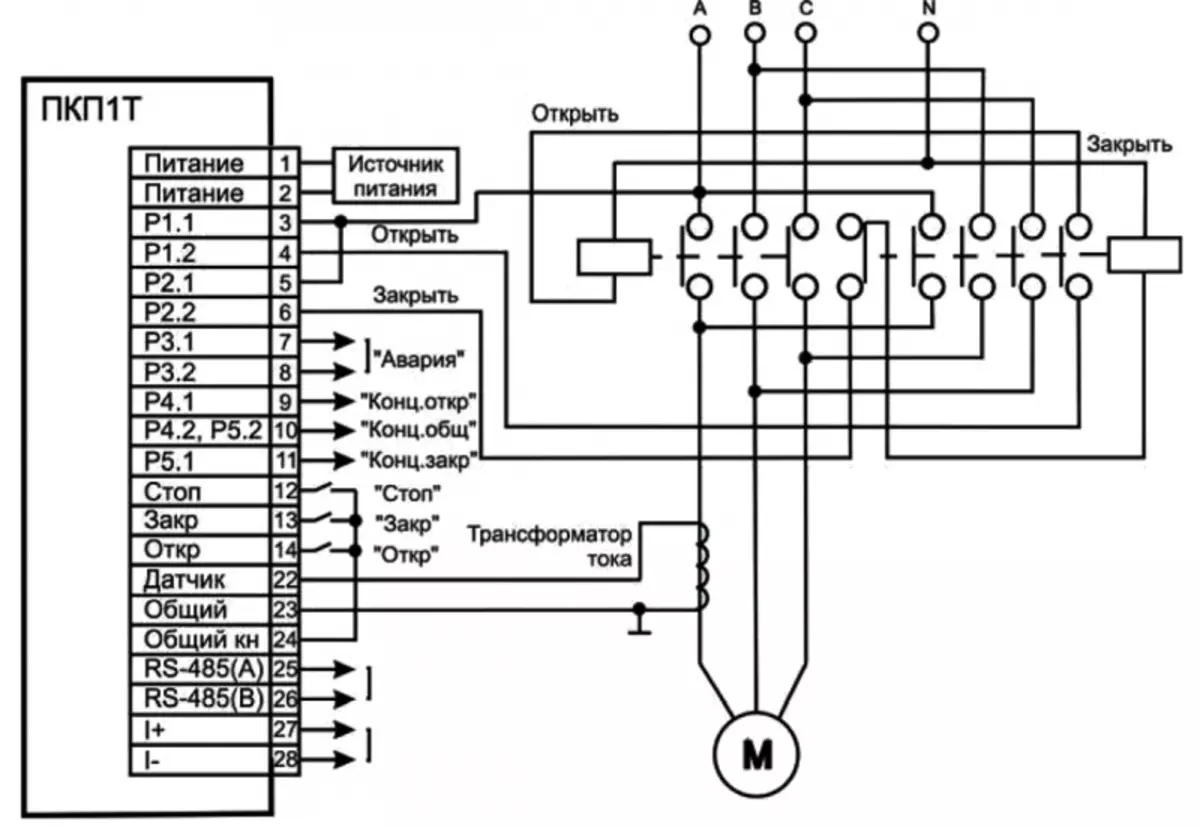
പിസിപി 1 ന്റെ പരിധി സ്വിച്ചുകൾ ഉപയോഗിക്കാതെ വാൽവ് ഷട്ട്ട്ടിംഗിന്റെ ഉപകരണ പരിരക്ഷണവും നിയന്ത്രണവും:
- Pkp1t - വൈദ്യുത ഡ്രൈവ് ഉപയോഗിക്കുന്ന നിലവിലെ വാൽവിന്റെ സ്ഥാനം നിയന്ത്രിക്കുന്നു, അതിന്റെ പ്രസ്ഥാനത്തിന്റെ സമയം;
- Pkp1i - ടസ് കാലയളവിലെ വാൽവിന്റെ സ്ഥാനങ്ങൾ നിയന്ത്രിക്കുന്നു, അത് സെൻസറിൽ നിന്ന് ഉരുളുന്നു, റോളറുകളുടെ എണ്ണം.
കാരം
പരിധി സ്വിച്ചുകൾ ഉപയോഗിക്കാതെ ജാമിംഗിന് സംഭവിക്കാതെ ജാമിംഗിന്റെ കാര്യത്തിൽ ജാമിംഗും വൈദ്യുത ഡ്രൈവുകളും നിയന്ത്രിക്കുന്നതിനാണ് പിസിപി 1 ഉപകരണം രൂപകൽപ്പന ചെയ്തിരിക്കുന്നത്.
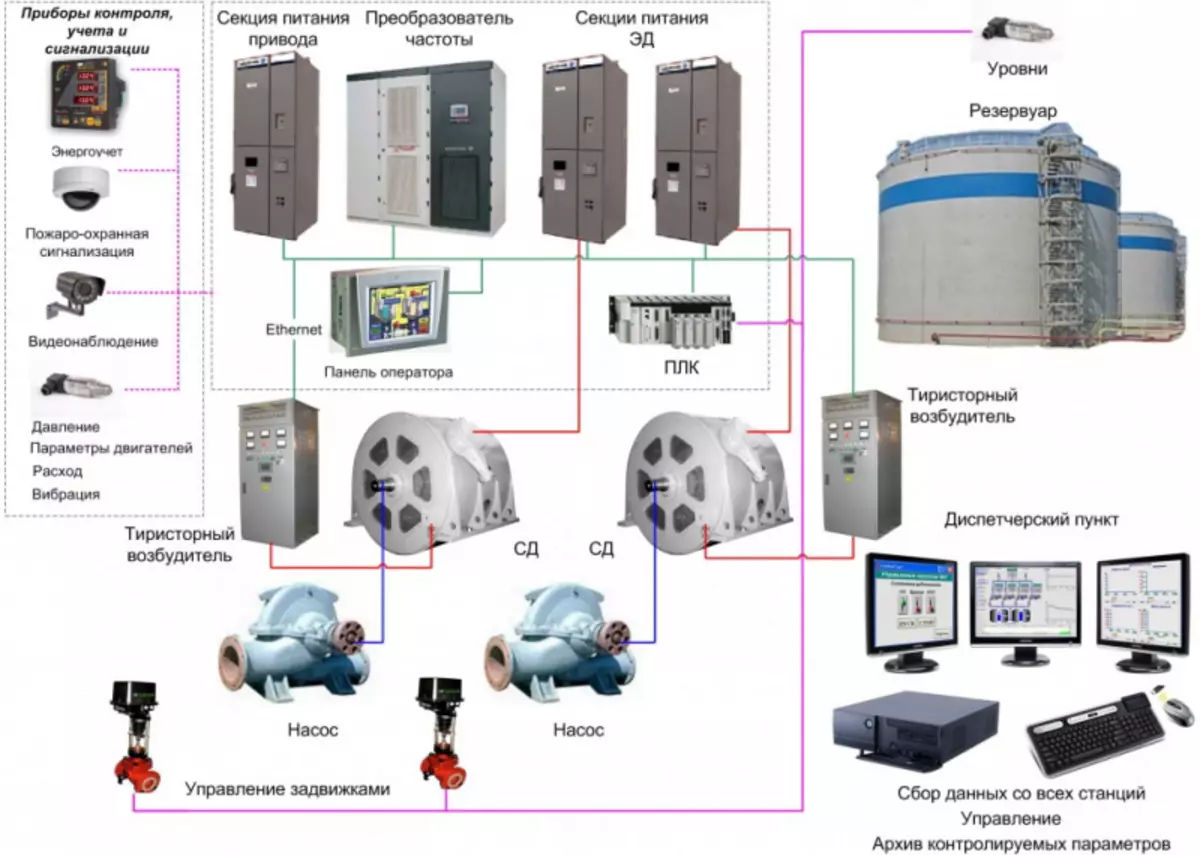
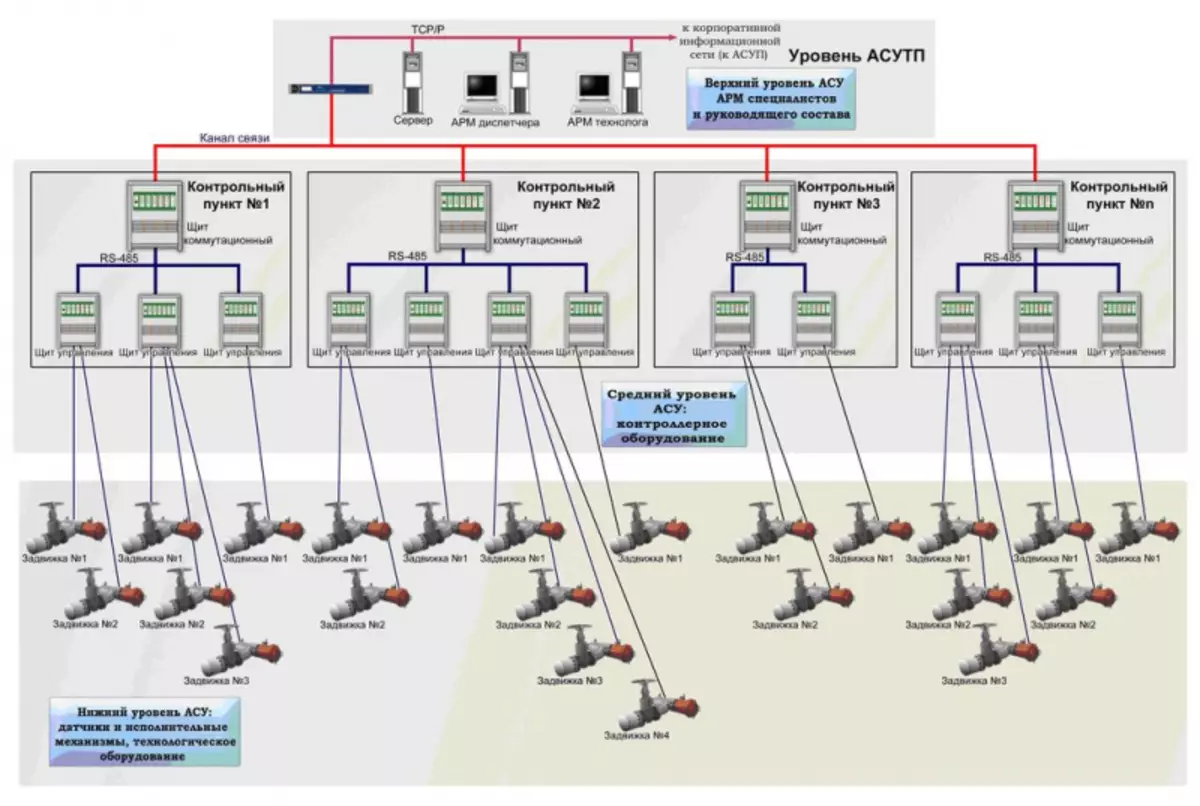
പമ്പിംഗ് സ്റ്റേഷന്റെ പദ്ധതി.
പ്രധാന പ്രവർത്തനങ്ങൾ:
- പരിധി സ്വിച്ചുകൾ ഉപയോഗിക്കാതെ അങ്ങേയറ്റത്തെ സ്ഥാനം എത്തുമ്പോൾ ഇലക്ട്രിക് ഡ്രൈവിന്റെ യാന്ത്രിക ഷട്ട്ഡ .ൺ;
- % ലെ വാൽവിന്റെ നിലവിലെ സ്ഥാനത്തിന്റെ സൂചനയും നിയന്ത്രണവും;
- ഡ്രൈവ് നിയന്ത്രണം നിർത്തി "അപകടം" സിഗ്നൽ വിതരണം ചെയ്യുക അല്ലെങ്കിൽ ഇലക്ട്രിക് ഡ്രൈവിന്റെ സംവിധാനങ്ങളുടെ സ്ലിപ്പെൽ വിതരണം ചെയ്യുക അല്ലെങ്കിൽ വാൽവ് ജാമിംഗ് ചെയ്യുക;
- പരിധി സ്വിച്ചുകളും അലാറത്തിനുള്ള റിലേയും അനുകരിക്കുന്നതിന് വാൽവ് നിയന്ത്രിക്കുന്നതിന് PCP1 ന് രണ്ട് ഉൽപാദന വിശ്കലങ്ങളുണ്ട്.
കൂടാതെ, പിസിപിഎമ്മിൽ ഉപഭോക്താവിന്റെ അഭ്യർത്ഥന, വാൽവിന്റെ കണ്ടെത്തലിന്റെ കണ്ടെത്തൽ ബിരുദത്തിന് ആനുപാതികമല്ലാത്ത ഒരു മൊഡ്യൂൾ (4-20 എംഎ), ഒരു ഏകീകൃത നിലവിലെ സിഗ്നൽ (4-20 എംഎ) സൃഷ്ടിക്കുന്ന ഒരു മൊഡ്യൂൾ, മ .ണ്ട് ചെയ്യാൻ കഴിയും.
പ്രോഗ്രാമിംഗ്. ഒബ്ജക്റ്റിൽ ക്രമീകരിക്കുന്നു.
ഒബ്ജക്റ്റിൽ ഉപകരണം ക്രമീകരിക്കുന്നതിന്, ഡ്രോയിംഗ് താൽക്കാലിക പ്രോഗ്രസ് പാരാമീറ്ററുകളും അവസാന സ്ഥാനങ്ങളും നിർണ്ണയിക്കാനുള്ള വഴികളും സജ്ജമാക്കി.
ഇലക്ട്രിക് ഡ്രൈവിന്റെ പ്രവർത്തനരീതി അറിയാമെങ്കിൽ, നിങ്ങൾ സംരക്ഷണ ഷട്ട്ഡൗൺ പാരാമീറ്ററുകൾ സജ്ജീകരിക്കേണ്ടതുണ്ട്. നിർദ്ദിഷ്ട പാരാമീറ്ററുകൾ അസ്ഥിരമല്ലാത്ത ഉപകരണ മെമ്മറിയിൽ സംരക്ഷിക്കുകയും ശക്തി ഓഫാകുമ്പോൾ മാറ്റമില്ലാതെ തുടരുകയും ചെയ്യും. ഫ്രണ്ട് പാനലിൽ സ്ഥിതിചെയ്യുന്ന ബട്ടണുകൾ ഉപയോഗിച്ച് ഉപകരണം പ്രോഗ്രാമിംഗ്.
പാരാമീറ്റർ മാറ്റങ്ങളിലേക്കുള്ള അനധികൃത ആക്സസ് തടയുന്നതിന്, പരിരക്ഷണം ഇൻസ്റ്റാൾ ചെയ്തു.